КЭБ Форум
Форум клуба энтузиастов биотранспорта
- Вы не зашли.
#1 2008-05-19 07:18:37
Новый привод
Уважаемые господа, предлагаю Вашему вниманию конструкцию двух приводов, один из которых предназначен для веломобилей, а другой для инвалидных колясок.
Основным недостатком классического привода является то, что уже на цепь передается, в самом лучшем случае, 63,7% усилий, прилагаемых ногами человека к педалям. Эти проценты относятся также к полезной работе и к кпд. Взаимодействие ноги человека с педалями и шатунами можно сравнить с работой кривошипно-шатунного механизма, в котором то, что в велосипеде называется шатуном, является в теории машин и механизмов кривошипом, а шатуном является нога человека. Для полной передачи усилия ноги человека на цепь предлагается конструкция привода, в котором вращение ведущей звездочки с помощью педалей и шатунов заменено одновременными толкающими усилиями ног человека, прилагаемыми к педалям, неподвижно установленным на двух, жестко соединенных между собой, каретках, скользящих в направляющих профилях и протягивающих за собой с помощью сдвоенных храповых собачек приводную цепь, перекинутую через переднюю, свободно сидящую на оси звездочку, и заднюю ведомую звездочку, жестко посаженную на вал отбора мощности. Принцип действия и принципиальная схема такого привода изложены в описании «Привод1».
Привод для инвалидных колясок состоит из двух пар направляющих профилей, в каждой из которых перемещаются каретки, жестко соединенные между собой перекладиной, на которой установлены рукоятки для приложения усилий рук человека. На внешних боковых сторонах кареток установлены сдвоенные храповые собачки, равноудаленные от проложенных между ними цепей. Цепи перекинуты через верхние свободно посаженные на оси звездочки и нижнюю жестко посаженную на вал отбора мощности звездочку. Таким образом, на цепи будут передаваться практически полностью усилия рук человека прилагаемые к перекладине привода. Сложность заключается в том, что с помощью всего лишь двух рук необходимо приводить в действие транспортное средство, управлять направлением движения, осуществлять переключение передач и торможение, но она не является непреодолимой. Принцип действия и принципиальная схема такого привода изложены в описании «Привод2».
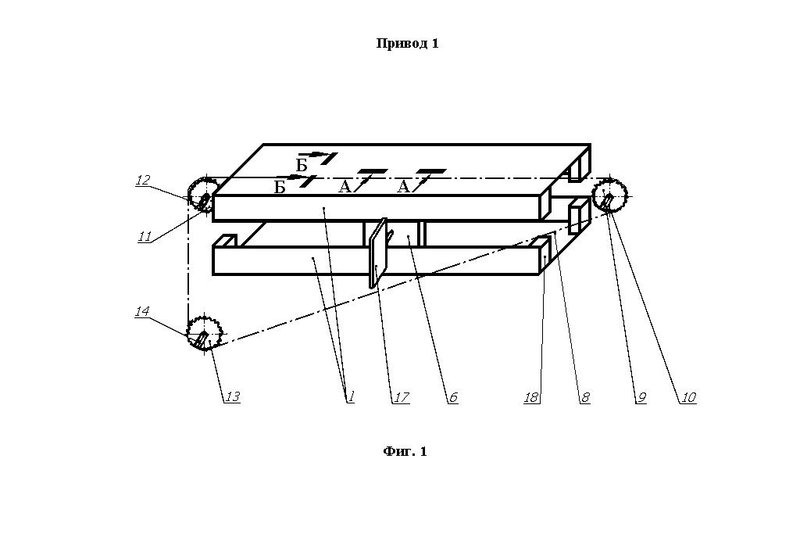
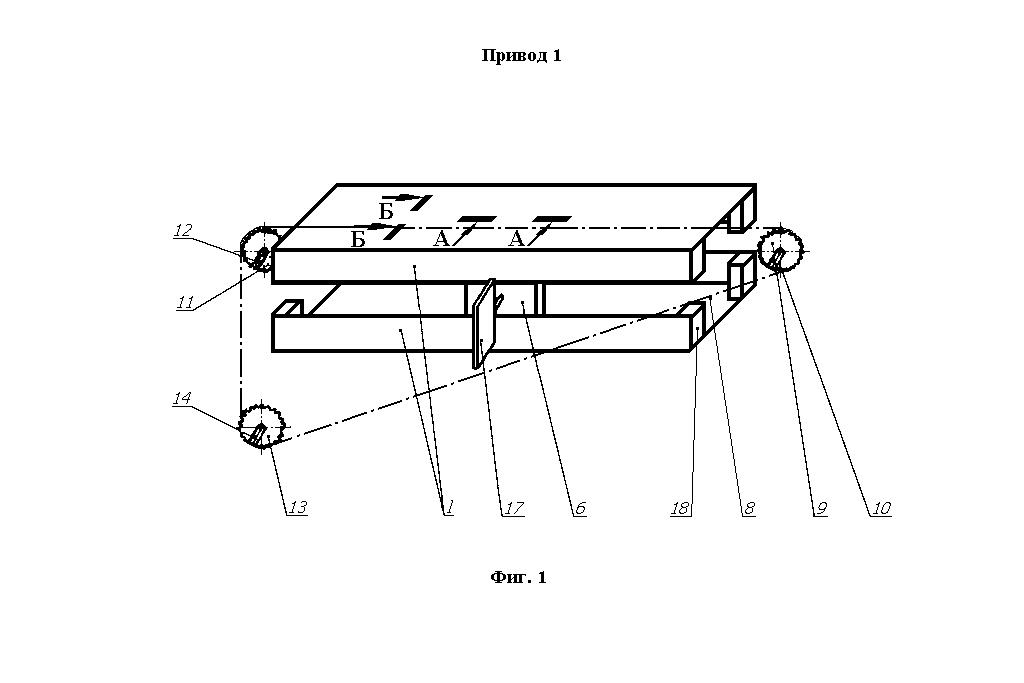
Привод1
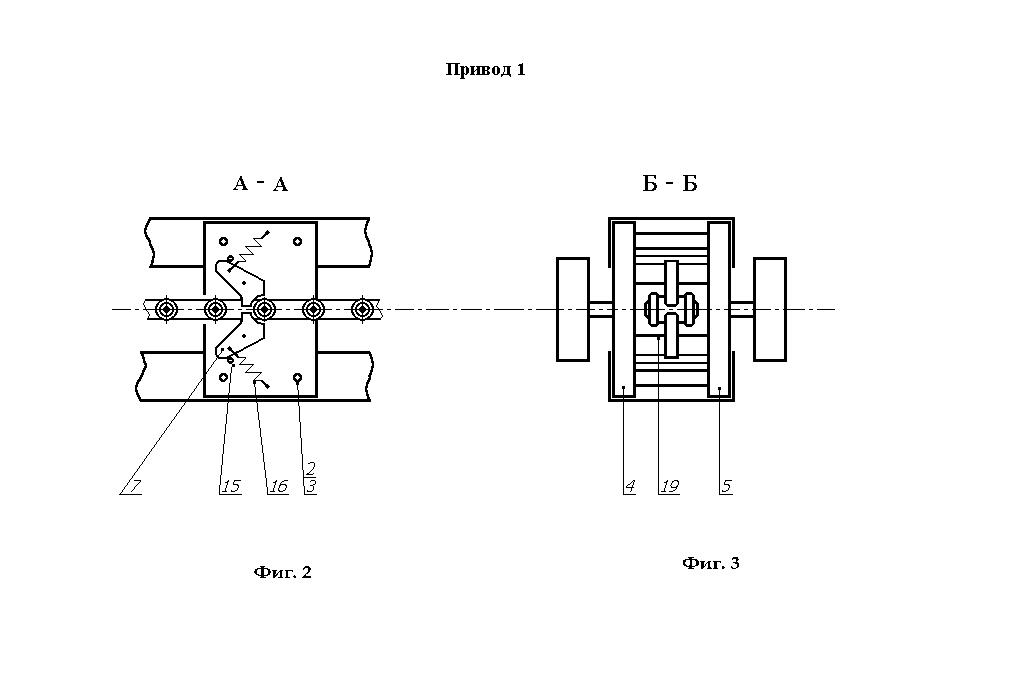
В двух направляющих профилях 1 имеют возможность совершать возвратно-поступательные перемещения две, жестко соединенные между собой болтами 2 через распорные втулки 3, каретки 4, 5, образующие единый блок кареток 6. Между внутренними, обращенными друг к другу, поверхностями кареток 4, 5 расположены оппозитно две храповые собачки 7 для одновременного двустороннего захвата и протягивания вслед за блоком кареток 6 проложенной между ними цепи 8, перекинутой: через переднюю звездочку 9, свободно посаженную на ось 10, через заднюю звездочку 11, свободно посаженную на ось 12, и через ведомую звездочку 13, жестко посаженную на вал отбора мощности 14. Рабочая поверхность пары храповых собачек 7, удерживаемых на упорах 15 прижимными пружинами 16, образована цилиндрической поверхностью, диаметр которой равен диаметру втулки звена цепи 8. На внешних боковых сторонах блока кареток 6 установлены педали 17 для приложения усилий ног человека. Использование для захвата звеньев цепи 8 двух храповых собачек 7 позволяет более надежно захватывать цепь 8 при укороченной длине рабочих зубьев. В свою очередь, укороченные рабочие зубья облегчают выход храповых собачек 7 из зацепления с звеньями цепи 8 при обратном ходе блока кареток 6. Жесткое соединение кареток 4, 5 допускает только одновременное использование ног во время работы привода, позволяя выбрать такое расположение педалей 17 на каретках 4, 5, при котором силы, прилагаемые ногами человека к педалям 4, 5 и сила реакции захваченного храповыми собачками 7 звена цепи 8, находятся в одной плоскости. Блок кареток 6 не доходит до ограничителей 18 во время работы привода, так
как они необходимы только для предотвращения соударения блока кареток 6 с другими подвижными деталями привода в случае его (блока) неконтролируемого перемещения в направляющих профилях 1. Привод приводится в действие одновременным нажатием ногами на педали 17 блока кареток 6, находящегося в исходном, т.е. в крайнем заднем положении. Усилия ног от педалей 17 передаются на блок кареток 6, а от него, с помощью храповых собачек 7, на цепь 8. Далее усилия передаются на ведомую звездочку 13, а от нее – на вал отбора мощности 14. Если усилие, передаваемое на вал отбора мощности 14, больше сопротивления нагрузки, то блок кареток 6 продвигается вперед по опорным поверхностям направляющих профилей 1, протягивая с помощью сдвоенных храповых собачек 7 цепь 8, которая вращает переднюю 9 и заднюю 11, свободно посаженные на оси 10, 12 соответственно, звездочки и ведомую звездочку 13, а через нее - вал отбора мощности 14. После достижения блоком кареток 6 крайнего переднего положения он возвращается в крайнее заднее положение усилиями ног человека. При этом сдвоенные храповые собачки 7, преодолевая незначительное сопротивление прижимных пружин 16, поворачиваются на своих осях 19, выходят из зацепления с втулкой роликовой цепи 8 и скользят по поверхностям остальных втулок. После достижения блоком кареток 6 крайнего заднего положения рабочий цикл повторяется и т. д.
Рисунки здесь:
 Фиг1 http://b0.imgsrc.ru/k/korvet/8997064esm.jpg
Фиг1 http://b0.imgsrc.ru/k/korvet/8997064esm.jpg 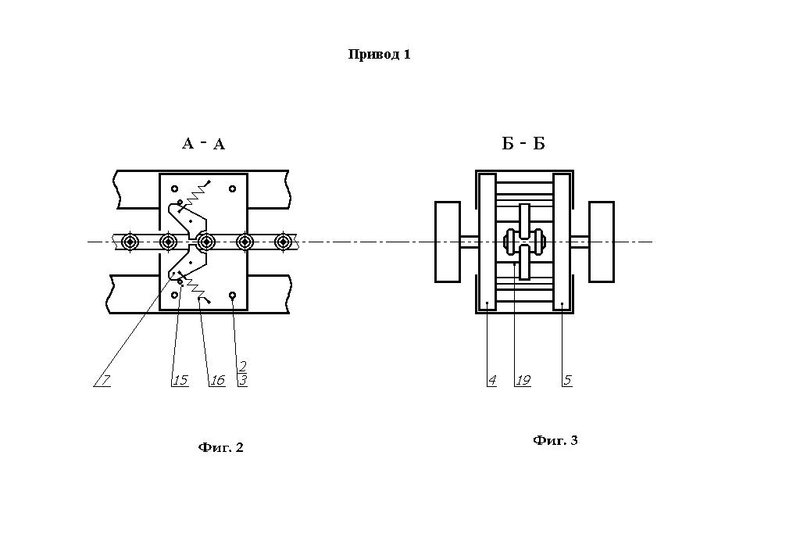 Фиг2 http://b0.imgsrc.ru/k/korvet/8997065vjL.jpg
Фиг2 http://b0.imgsrc.ru/k/korvet/8997065vjL.jpg
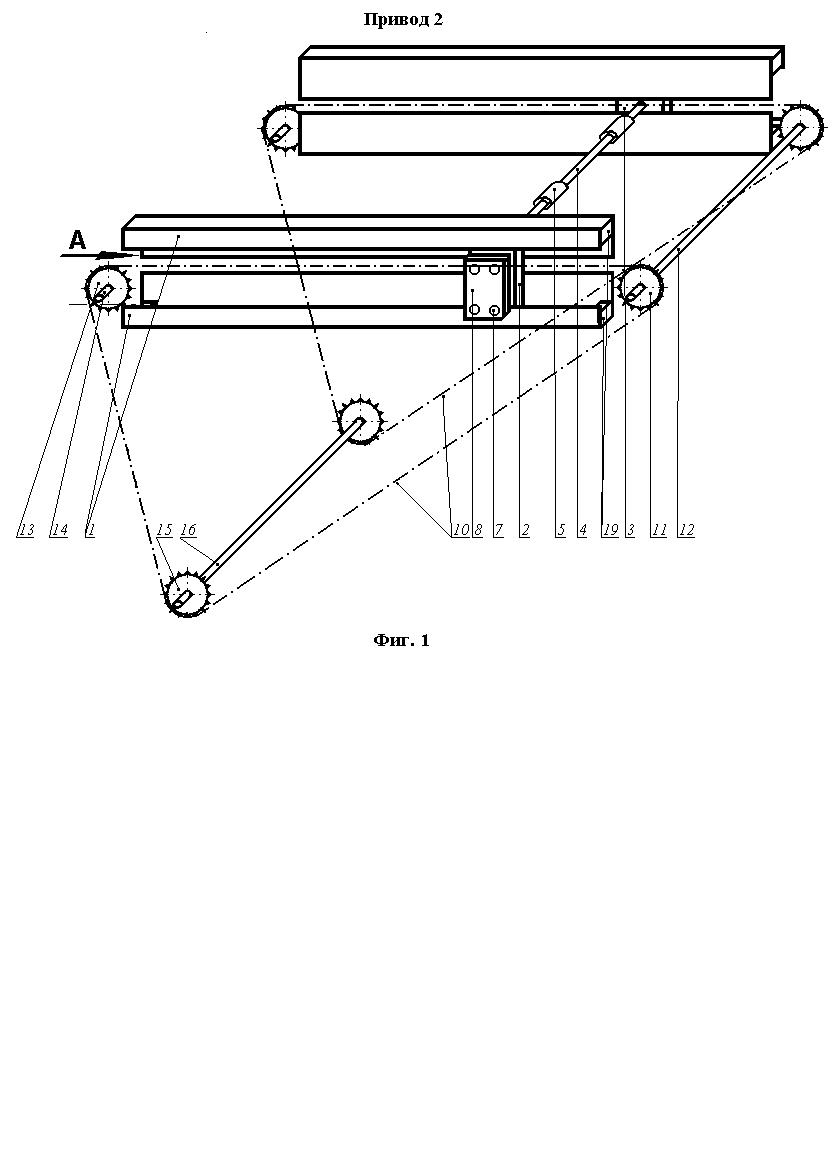
Привод2
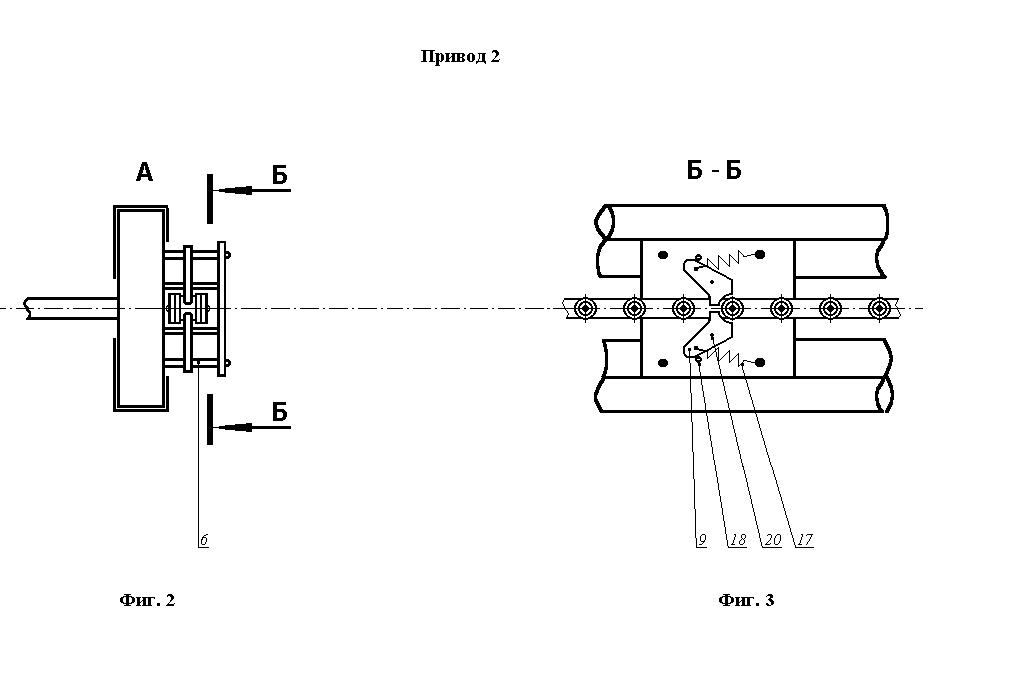
В двух парах направляющих профилей 1 совершают возвратно-поступательные перемещения каретки 2, 3, между внутренними, обращенными друг к другу, поверхностями которых расположена, жестко соединяющая каретки 2, 3, перекладина 4, на которой установлены две передвижные рукоятки 5 для приложения усилий рук человека с возможностью фиксации в месте установки. Между внешними боковыми поверхностями кареток 2, 3 и установленными на них через распорные втулки 6 с помощью болтов 7 щитками 8 установлены оппозитно по две храповые собачки 9 для одновременного двустороннего захвата и протягивания вслед за каретками 2, 3 проложенных между ними цепей 10, перекинутых через передние звездочки11 свободно посаженные на ось 12 и задние звездочки 13 свободно посаженные на оси 14, а также через ведомые звездочки 15, жестко посаженные на вал отбора мощности16. Рабочие поверхности каждой пары храповых собачек 9, находящихся под действием прижимных пружин 17 на упорах 18 образованы цилиндрической поверхностью, диаметр которой равен внешнему диаметру втулок звеньев цепей 10. Использование для зацепления звеньев каждой цепи10 двух храповых собачек 9 позволяет более надежно захватывать цепи 10 при укороченной длине рабочих зубьев. В свою очередь, укороченные рабочие зубья облегчают выход храповых собачек 9 из зацепления с звеньями цепей 10 при обратном ходе кареток 2, 3. Во время работы привода каретки 2, 3 не доходят до передних и задних
ограничителей 19, так как они необходимы только для предотвращения соударения кареток 2, 3 с другими подвижными деталями привода в случае их (кареток) неконтролируемого перемещения в направляющих профилях 1. Направляющие профили 1 установлены на высоте, обеспечивающей наиболее эффективное использование усилий рук человека.
Привод приводится в действие одновременным приложением усилий рук человека к рукояткам 5, усилия от которых передаются на перекладину 4, а от нее - на каретки 2, 3, от которых усилия рук человека передаются посредством храповых собачек 9 на цепи 10, а от них - на ведомые звездочки 15 и далее – на вал отбора мощности 16. Если усилие, передаваемое на вал отбора мощности 16, больше сопротивления нагрузки, то перекладина 4 вместе с каретками 2, 3 перемещается вперед, протягивая с помощью храповых собачек 9 цепи 10, которые через ведомые звездочки 15 вращают вал отбора мощности 16. После достижения перекладиной 4 с каретками 2, 3 крайнего переднего положения она возвращается в исходное, то есть в крайнее заднее положение, усилиями рук человека. При перемещении кареток назад храповые собачки 9 отходят от захваченных ими звеньев цепей10. В результате давления на задние поверхности храповых собачек 9, оказываемого набегающими звеньями цепей 10, храповые собачки 9, преодолевая незначительное сопротивление прижимных пружин 17, поворачиваются на своих осях 20 и скользят по поверхностям
остальных втулок. После достижения перекладиной 4 крайнего заднего положения рабочий цикл повторяется и т. д.
Рисунки здесь: 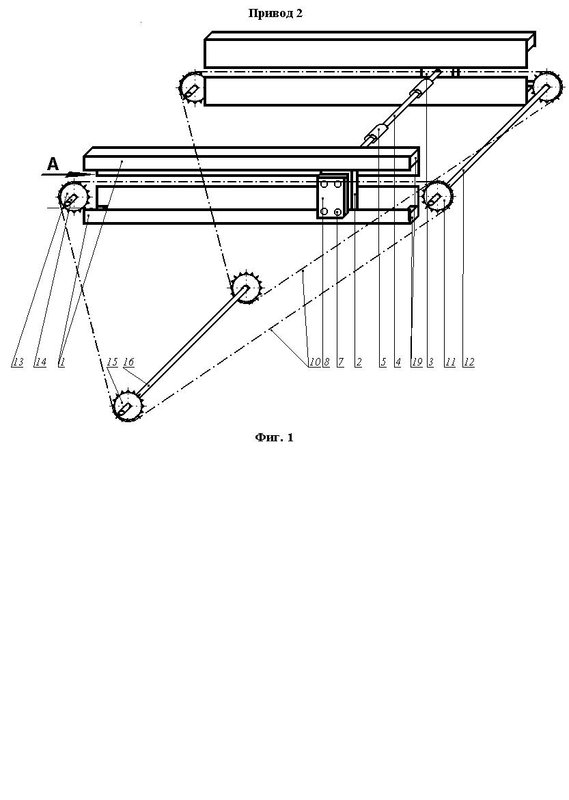 Фиг1 http://b0.imgsrc.ru/k/korvet/8997066LYt.jpg
Фиг1 http://b0.imgsrc.ru/k/korvet/8997066LYt.jpg 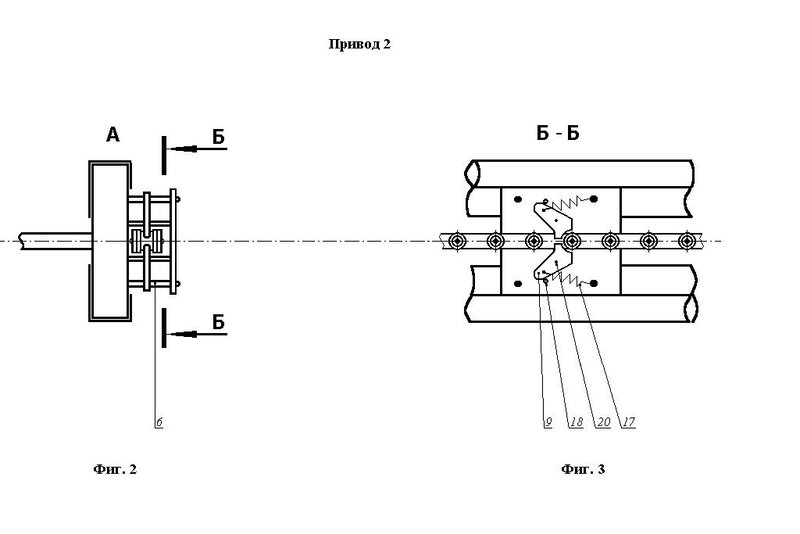 Фиг2 http://b0.imgsrc.ru/k/korvet/8997067Hpo.jpg
Фиг2 http://b0.imgsrc.ru/k/korvet/8997067Hpo.jpg
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Отредактированно Korvet (2008-05-29 08:02:54)
Неактивен
#2 2008-05-20 01:33:32
- Алексей Ганшин
- Member

- Откуда: Украина
- Зарегистрирован: 2008-04-08
- Сообщений: 549
- Профиль Вебсайт
Re: Новый привод
А такой привод уже испытан? Просто я не любитель воплощать чужие идеи, а свои проверяю сам. По этому и вопрос, если всё так просто, то должен быть рабочий образец, и должны быть фотографии привода и фотографии машин с ним.
Не забывайте, что вытянутая нога давит сильнее, чем согнутая, то есть приближаясь к дальней мёртвоё точке усилие растёт, а потом нога отдыхает, пока идёт через мёртвую точку и назад. Лично я считаю, что моменты отдыха необходимы мышцам, а все эти новые приводы могут пригодиться только для гонок на короткие дистанции, где нужна максимальная отдача.
Больше метров с меньшими усилиями! (лозунг "М5")
Неактивен
#3 2008-05-30 06:20:55
Re: Новый привод
Алексей, до испытания такого привода еще далеко, так как у меня нет никакой возможности изготовить опытный образец. То обстоятельство, что вытянутая нога давит сильнее, означает, что потеря мощности в классическом приводе значительно превосходит минимальные 36%. Не удивлюсь, если потеря мощности в целом будет не менее 50%. В сравнении с такими большими процентами Ваши возражения выглядят, мягко говоря, неубедительно.
Неактивен
#4 2008-05-30 09:22:23
- Ульяновский Вениамин Вени
- Member
- Зарегистрирован: 2007-09-08
- Сообщений: 2310
- Профиль
Re: Новый привод
Korvet написал:
Уважаемые господа, предлагаю Вашему вниманию конструкцию...
Уважаемый Korvet!
Извините за помощь, но я з взял на себя смелость вставить ваши рисунки вашего изобретения в ваше же сообщение. Для ясности, так как суть изобретения - то бишь, нового технического решения - на пальцах объяснять не принято. Рисунки размещать на форуме несложно (см. тему "Как ставить фото на форум" http://etracab.ru/forum/viewtopic.php?id=81).
Во-вторых. Днями ранее, поприветствовав Вас на нашем сайте (чёрт знает, куда это мое сообщение пропало!), и не видя графического отображения вашего новшества, осторожно поинтересовался: не знакомы ли Вы с линейными приводами Н.Сатарова (1984 г.) и С.Лукьянова (1986 г.)?
Теперь, в свою очередь, познакомившись с фиг-ми.1,2,..., предлагаю Вам внимательно посмотреть аналогичные картинки в популярном журнале "Техника-молодежи" № 4 за 1986 г. (иллюстрации на обложке к моей статье "Веломобиль для всех") и в журнале "Изобретатель и рационализатор" (статья, по-моему, О.Сердюкова об итогах шяуляского фестиваля 1986 года). Если обнаружите принципиальные (подчеркиваю, принципиальные и, разумеется, дающие новый положительный эффект. У изобретения Сатарова, кстати, рабочий ход может быть как при движении педалей вперед, так и назад!) отличия от своих изобретений - срочно сообщите здесь на форуме. Принесу Вам извинения за свою некомпетентность, как минимум.
Отредактированно Ульяновский Вениамин Вени (2008-05-30 09:56:01)
Неактивен
#5 2008-06-02 12:05:25
Re: Новый привод
Вени, спасибо за помощь, с рисунками будет понятнее. То, что было днями раньше, я удалил, так как все поместил здесь. С линейными приводами Н.Сатарова (1984 г.) и С.Лукьянова я не знаком. Буду искать журналы "Изобретатель и рационализатор" и "Техника-молодежи", но не очень настойчиво. Я задумывался над этим вопросом и рассудил следующим образом. Чем более привлекательное мое предложение, тем меньше вероятность того, что оно является повторением чужого. А так как считаю свое предложение в высшей степени привлекательным, то будучи обнародовано кем-либо ранее, оно в настоящее время получило бы самое широкое распространение.
Неактивен
#6 2008-06-02 14:41:11
Re: Новый привод
Дмитрий, прежде всего в том, что устраняется потеря 36-ти процентов усилий передаваемых на цепь. Естественная низкая посадка. В два раза меньше износ цепи, так как отсутствует силовая ведущая звездочка. На мой взгляд ничего мудренного нет, все проще пареной репы.
Неактивен
#7 2008-06-02 15:32:47
- Алексей Ганшин
- Member
- Откуда: Украина
- Зарегистрирован: 2008-04-08
- Сообщений: 549
- Профиль Вебсайт
Re: Новый привод
Лично я поверю в полезность этих нововведений, когда увижу результаты испытаний или сам испытаю.
Больше метров с меньшими усилиями! (лозунг "М5")
Неактивен
#8 2008-06-11 07:22:01
Re: Новый привод
Уважаемые господа, для упрощения рассуждений в процессе поиска бесследно исчезающих 36% кпд велосипедного привода предположим, что на шатуны попеременно действуют одинаковые силы, направленные вниз по вертикали. Тогда каждую силу можно разложить на две составляющие, одна из которых, перпендикулярная шатуну, образует вращающий момент, а другая – направлена вдоль шатуна создает давление на подшипники каретки. Сила, образующая вращающий момент шатуна, будет изменяться в соответствии с изменением синуса угла между вертикалью и шатуном. В результате попеременного действия двух сил на шатуны изменения усилий на цепи между ведущей и ведомой звездочками будут представлять собой последовательность полусинусоид, как это выглядит после сложения двух полупериодов выпрямленного переменного тока. Приняв величину каждой силы равной единице и произведя несложные вычисления, получим, что площадь синусоиды равна 2. Одновременно площадь синусоиды равна полезной работе, произведенной за поворот ведущей звездочки на 3,14 радиана. Полная работа за поворот ведущей звездочки на этот угол будет равна площади описанного вокруг синусоиды прямоугольника, высота которого равна единице, а длина - 3,14 радиана. Таким образом, кпд шатунной передачи будет равен (2/3,14)х100%. Еще хуже обстоит дело в случае кривошипно-шатунной передачи, так как синусоида обрезается еще косинусоидой угла между шатуном и направлением перемещения поршня в случае двигателя внутреннего сгорания. Именно по этой причине кпд двигателей внутреннего сгорания составляет немногим более сорока процентов. В велосипедном приводе достаточно сложно оценить влияние на кпд такого сложного составного шатуна в виде бедра, голени и стопы человека. Можно только сделать предположение, что потеря кпд есть и с этой стороны.. Учитывая, что после прохождения шатуном велосипеда от вертикали угла 90 градусов, усилие ноги на педаль продолжает возрастать по мере выпрямления ноги человека, а синус соответствующего угла уменьшается, не стоит удивляться тому, что кпд классического велосипедного привода окажется не более 50%. Как бы там ни было, предложенный привод исключает все мыслимые и немыслимые недостатки привода классического. В виду крайней простоты рассуждений надеюсь на то, что рисунки не понадобятся.
Неактивен
#9 2008-07-19 08:03:25
Re: Новый привод
Уважаемые господа, хочу построить веломобиль со своим приводом, но воспользоваться для этого знаниями, опытом и производственными возможностями других на договорной, естественно, основе. Прошу подсказать, где и с кем можно договориться. Сам я нахожусь в Белоруссии г. Бобруйск и желательно, чтобы другая договаривающаяся сторона была расположена как можно ближе.
Неактивен
#11 2008-07-27 06:52:06
Re: Новый привод
Уважаемый Shuriken, из разрозненных сведений у меня сложилось следующее представление о круговом педалировании. Для него необходимы контактные педали, которые позволяют ноге вначале давить на педаль, а затем уже тянуть ее вверх. Если я неправильно понимаю, то буду рад, если объясните мне, что это такое.
Неактивен